
產線自動上貨/疊棧機械手臂協作系統
機器手臂介紹
以PLC為主控制器,控制輸送帶與搭載真空吸盤之機械手臂,配合可供用戶調整設定之人機介面,建立產線前後端自動上貨/取貨之協作系統

系統特色
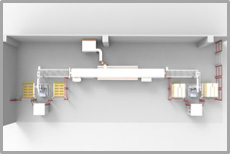
利用通訊模組連接複數PLC控制器,使產線不同工作區域間資料可相互傳遞,減少人工介入設定的必要性,並可提高產線生產產品的彈性,容許多批不同產品以任意數量依次進入產線;同時亦保留各設備獨立性,即使其中一部分設備異常,正常部分仍可獨立運作。
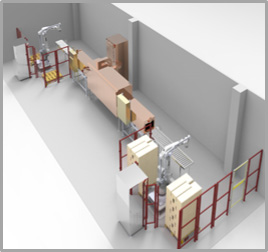
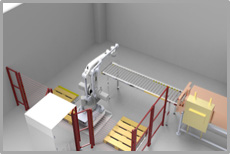
以PLC為主控制器,控制輸送帶與搭載真空吸盤之機械手臂,配合可供用戶調整設定之人機介面,建立產線前後端自動上貨/取貨之協作系統
利用通訊模組連接複數PLC控制器,使產線不同工作區域間資料可相互傳遞,減少人工介入設定的必要性,並可提高產線生產產品的彈性,容許多批不同產品以任意數量依次進入產線;同時亦保留各設備獨立性,即使其中一部分設備異常,正常部分仍可獨立運作。

